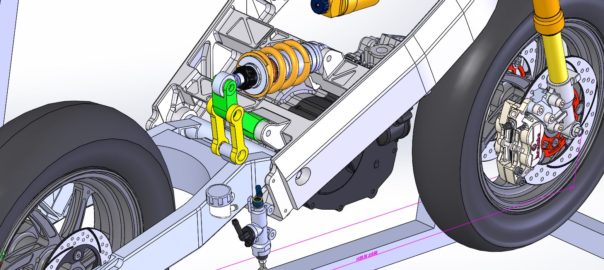
サスのリンクの計算はどうやったかと言うと、
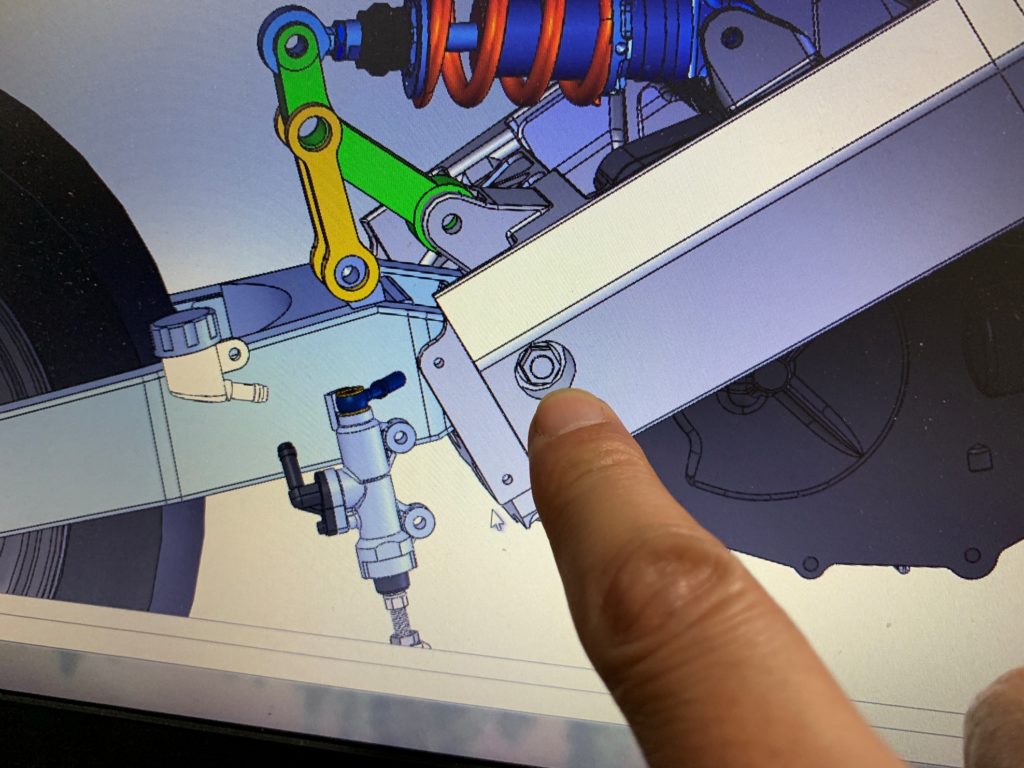
ピボット(スイングアームの軸のあるとこ、指でさしているとこ )をX,Y=0,0として、アクスルが10mm上がったら、サスが何mm沈むか?
というのを
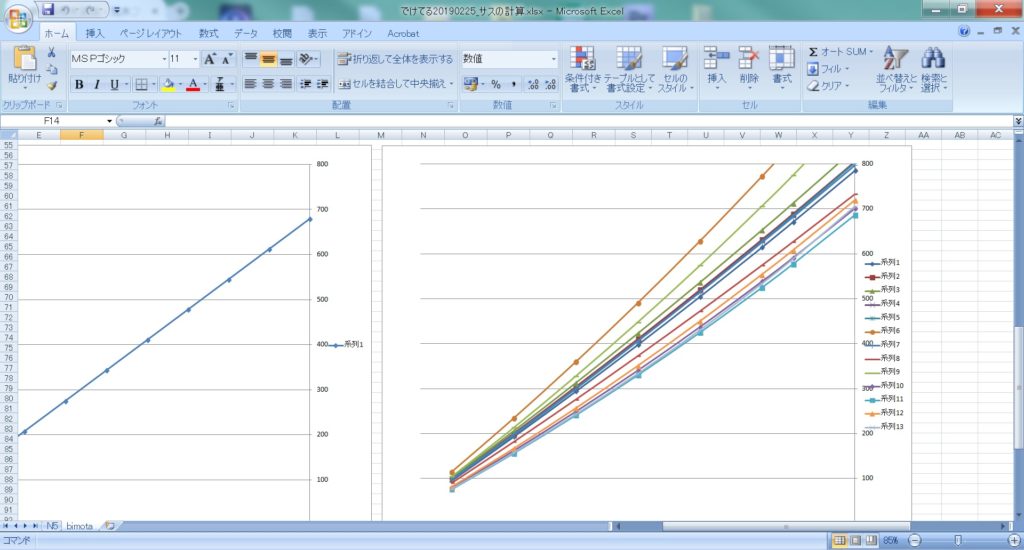
全部の可動ポイントを一個一個エクセルで計算していったのですが、かなり分けわからんかった。
出来がった計算シートはこれ ↑ なんですが、NSR50の、リンクなしのサスはまだいいものの、リンクありのミニSB6のサスは難儀しました。
結局三角関数を使うのですが、数学の教科書的なサイトかエクセルをレクチャーするサイトかのどちらかを見ることになります。
だいたいこれら↓を使うと算出出来ました。
SQRT((X1-X2)^2 + (Y1-Y2)^2)で2点間の直線距離が出る
DEGREES((ATAN2( X1-X2,Y1-Y2))で2点を結ぶ直線の角度が出る
距離*COS(RADIANS(角度))) で、距離と角度からX座標が出る
距離*SIN(RADIANS(角度)) で、距離と角度からY座標が出る
円と円の交点は余弦定理で出す。
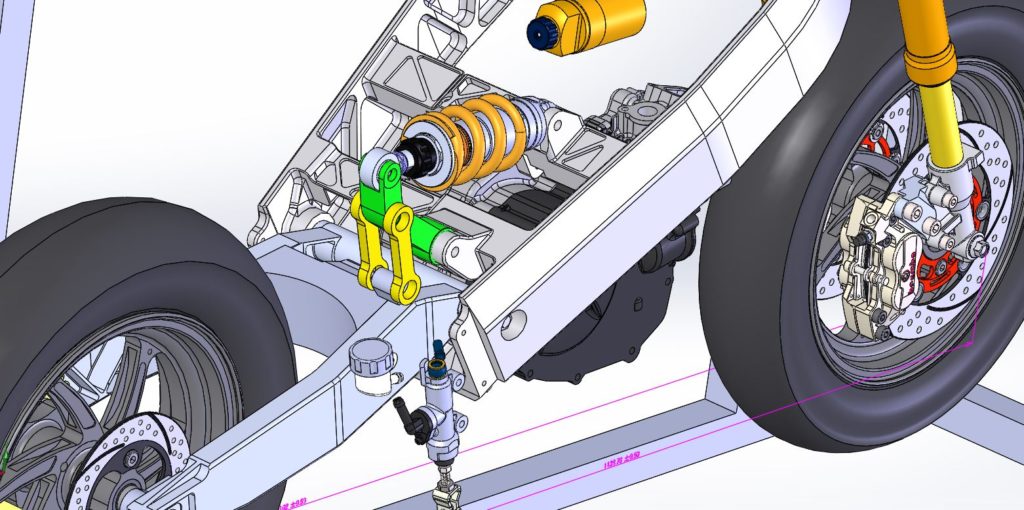
で、サスだけに流石リンクサス。
初動柔らかく奥で固いサスにすることができました。しかも実物のSB6の設置場所に近い位置に付いたし。
思っている通りに動作してくれたなら、NSR50よりもシルキーなハンドリングになってるかも知れません。
そんなことをやっている荒木エフマシンが本気で技術を投入して作った
メカニカル極まりないボールペン、
MechaSEA(メカシー)は
アマゾン、ヤフオク、弊社ウェブショップで販売しております。
下記よりお買い求めいただけます。
画像をタップ orクリックで販売ページにジャンプします。
2020年5月より兵庫県加西市のふるさと納税返礼品になりました。こちらもどうぞ!
 ヤフオク
ヤフオク



荒木エフマシン製品のご購入は下記へどうぞ!
タップorクリックで販売ページにリンクします。



